Рейтинг: 4.8/5.0 (1620 проголосовавших)
Рейтинг: 4.8/5.0 (1620 проголосовавших)Категория: Торрент-файлы
Для увеличения продуктивности и уменьшения затрат при использовании роботов, компания АББ разработала линейку программного обеспечения для поддержки ваших робототехнических систем на протяжении всего периода их деятельности.
Оффлай программирование с использованием симуляционных программ (Virtual Robot Technology) - это как работать с промышленным роботом прямо на Вашем компьютере.
Программирование в режиме офлайн – оптимальный способ максимизации рентабельности роботизированных систем. Программное обеспечение ABB RobotStudio, предназначенное для имитационного моделирования и офлайн-программирования, позволяет выполнять операции по программированию на ПК в офисе без необходимости останова производства. Оно также позволяет заранее готовить программы для роботизированных систем, что приводит к повышению общей продуктивности. RobotStudio предоставляет инструменты для повышения прибыльности ваших роботизированных систем за счет обеспечения выполнения таких задач, как обучение, программирование и оптимизация, не прерывая процесс производства. За счет этого создается множество преимуществ, в том числе:
Более быстрый запуск
Более быстрое изменение техпроцесса
В основе RobotStudio лежит ABB VirtualController, точная копия программного обеспечения, управляющего вашими роботизированными системами на производстве. Таким образом, обеспечивается возможность реалистичной имитации с использованием реальных программ и файлов конфигурации, идентичных используемым на занятых в производстве роботизированных комплексах.
 ПО для процессов электродуговой сварки
ПО для процессов электродуговой сварки
Программист вы или сварщик, ABB предлагает вам полный спектр легких в использовании программных инструментов для улучшения технологического процесса дуговой сварки, оптимизации производства, повышения продуктивности, снижения рисков и максимизации рентабельности роботизированных систем.
ArcWeld PowerPac это надстройка для Robot Studio, которая упрощает программирование роботов для электродуговой сварки.
VirtualArc программное обеспечение для PC, которое предоставляет дружественный графический интерфейс для настройки параметров электродуговой сварки.
RobotWare - Arc IRC5 включает в себя большое количество функций для применения в процессах электродуговой сварки.
 PickMaster - Легкий путь к упаковке
PickMaster - Легкий путь к упаковке
Интегрированный с контроллерами IRC5 или S4C, PickMaster является наилучшим решением для поддержки роботов в упаковочных операциях. Это програмное обеспечение на базе ПК, с удобным графическим интерфейсом для создания приложений, в которых до восьми роботов могут одновременно синхронизированно работать вдоль движущихся конвейерных линий.
Стандартный пакет PickMaster, включающий в себя множество полезных производственных функций, эффективно минимизирует риски в сложных производственных процессах.
Высокоточная система определения объектов и система проверки на сответствие заданным параметрам, в сочетании с эффективной системой отслеживания конвейера делает гибкое производство по-настоящему успешным.
Можно выбрать одну из двух версий PickMaster:
PickMaster 3 и PickMaster 5.
В основе обоих инструментов лежит идентичная концепция графического дизайна и структура ПО, поэтому пользователи могут с легкостью работать и с той, и с другой версией.
В PickMaster 3 входят усовершенствованные системы визуальной идентификации и жестко интегрированная возможность отслеживания состояния конвейера. Встроенная система визуальной идентификации является крайне совершенной, но PickMaster 3 также может работать с любым внешним датчиком (линейные сканеры, цветное зрение, 3D и пр.).
PickMaster 3 уже более 6 лет помогает пользователям сократить время на программирование и обеспечить крайне надежные высокоскоростные приложения.
PickMaster 5 – программное обеспечение для паллетизации, преемник хорошо известной системы ABB FlexPalletizer®. Новое программное обеспечение использует все наработки более десяти лет паллетизации, сочетая опыт с современной, гибкой программной частью.
PickMaster 5 содержит все функции, необходимые для создания надежной системы паллетизации, и предлагает многочисленные возможности для обеспечения её гибкости. Не требуется программирования робота, поскольку программное обеспечение является полностью открытым и доступным для обеспечения максимальной гибкости. Структура ПО позволяет вносить изменения в приложение без необходимости перепрограммирования.
Система FlexPicker включает в себя: робот IRB 340 с контроллером, специальное програмное обеспечение и систему технического зрения.
Основные достоинства системы:
Единый интерфейс для всей системы - легкий и быстрый в использовании
Модульная концепция - свобода в построении производственных линий
Возможность Off-line конфигурации - высокая гибкость
Легкость в программировании - быстрое начало работы
 Программное обеспечение для процессов производства платмасс
Программное обеспечение для процессов производства платмасс
Облегчите жизнь работникам цеха
Контроллер роботов IRC5 производства компании ABB дает множество возможностей программирования и эксплуатации роботизированного оборудования. RobotWare Plastics Mold – это дружественный пользователю интерфейс, разработанный специально для пластмассового производства, и те производители пластмассы, которые установили роботов с шестью осями, работающие на этом уникальном ПО, уже видят преимущества.
Теперь вы можете повысить эффективность монтажа, наладки и производства. При использовании ABB FlexPendant, с его ярким цветным экраном, логичным и простым визуальным языком, программирование графического интерфейса пользователя становится очень простым, как и эксплуатация и доступ к информации!
 Программное обеспечение для процессов точечной сварки
Программное обеспечение для процессов точечной сварки
Высокое качество и полное управление процессом
ABB предлагает программное обеспечение RobotWare для точечной сварки; оно поможет создать индивидуализированные, легкие в использовании пакеты функций для различных типов систем точечной сварки.
Программное обеспечение для точечной сварки разрабатывается и настраивается таким образом, чтобы оптимизировать процесс для использования роботов ABB IRB6600 и IRB7600 и оборудования для точечной сварки, производимое ABB. Пакеты полностью интегрированы, что обеспечивает высокое качество и эффективность процесса.
Усовершенствованная система управления движением робота обеспечивает высокоэффективный процесс точечной сварки. Существует несколько вариантов программного обеспечения (в зависимости от технологического процесса и аппаратной части).
RobotWare - Spot IRC5
Специализированное программное обеспечение для облегчения процесса точечной сварки
 ПО для процессов прессового производства
ПО для процессов прессового производства
Пакет RobotPress Synchronization
Механические и гидравлические прессы
За счет использования программного обеспечения Robot-Press Synchronization робот следует за движениями пресса, плавно адаптируя его скорость в реальном времени для обеспечения оптимизации продолжительности производственного цикла и минимизации механических напряжений.
Пакет StampMaster (SMS2)
StampMaster G2 – новое поколение программного обеспечения для контроля производственной линии, разработанного ABB с целью вовлечения линии прессов в «процесс сотрудничества», но при этом использующего базовую функциональность систем SCADA, например, инструментов визуализации и интерфейса «человек-машина».
StampWare – это семейство ПО для контроллеров IRC5, предназначенное для повышения производительности за счет минимизации времени обучения и настройки на новом производстве. Модульная структура программы, мастер настройки и графическое окно производства – все это обеспечивает уменьшение времени обучения оператора и программиста.
 ПО для процессов механообработки
ПО для процессов механообработки
RobotStudio Machining PowerPac
RobotStudio Machining PowerPac – надстройка к Robot Studio, позволяющая создавать сложные траектории за несколько секунд!
Повышение эффективности и производительности механической обработки.
Пакет RobotWare Machining FC
Высококачественная автоматизированная шлифовка и чистовая обработка отливок стала возможной с помощью RobotWare Machining FC.
В основе RobotWare Machining FC лежат две передовые программные особенности. Первая, FC Pressure, обеспечивает возможность шлифовки или полировки отливок с сохранением постоянного давления инструмента на заготовку. Вторая программная особенность, FC SpeedChange, дает роботу возможность снимать заусенцы или облой на гранях и поверхностях отливок с управляемой скоростью, замедляясь при наличии избыточного количества заусенцев.
 ПО для процессов обслуживание станков
ПО для процессов обслуживание станков
ABB предлагает интегрированный комплект программных инструментов, в которых нашел свое отражение обширный опыт ABB в области обслуживания станков, нацеленный на снижение эксплуатационных расходов и повышение производительности. Это программное обеспечение обеспечивает легкость и гибкость программирования, прямолинейность конфигурирования и бесперебойную эксплуатацию роботов ABB в производственных модулях по обслуживанию станков.
Программист вы или специалист по прикладному использованию, полный спектр программного обеспечения поможет вам усовершенствовать процесс обслуживания машин, снизить риски и максимизировать прибыльность ваших роботизированных систем.
Экономия времени – это экономия денег, а когда дело касается сокращения времени, необходимого для открытия и закрытия обрабатывающих комплексов для вывода из него робота, секунды могут сэкономить очень много. Программное обеспечение Machine Sync, в котором нашел свое отражение обширный опыт роботизированного обслуживания станков, повышает производительность роботов за счет координирования времени открытия и закрытия обрабатывающего комплекса, что приводит к уменьшению продолжительности производственного цикла. Кроме того, координирование времени открытия и закрытия станка приводит к уменьшению износа робота и предотвращению столкновений.
RoboWare Machine Tending
RobotWare Machine Tending – это гибкое ПО контроллера IRC5 для развертывания и эксплуатации роботов ABB. Оно включает в себя интуитивно понятный графический пользовательский интерфейс, обеспечивающий бесперебойную и безопасную эксплуатацию, контроль и управление производством, а также автоматический выбор программ и деталей.
Несмотря на то, что интерфейс был спроектирован таким образом, чтобы даже наименее подготовленный оператор мог управлять самыми распространенными задачами, программное обеспечение предоставляет более опытным пользователям неограниченный доступ к мощным инструментам программирования RAPID.
RobotStudio Machine Tending PowerPac
RobotStudio Machine Tending PowerPac – дополнение к RobotStudio, формирующее платформу для быстрого и легкого создания и редактирования роботизированных производственных модулей для обслуживания станков в виртуальной 3D-среде.
Используя библиотеку самых распространенных типов захватов и станций, а также функции встроенной поддержки большинства машин и периферийного оборудования, очень легко создать производственный модуль и проверить его работоспособность в виртуальном мире. Кроме того, стало значительно проще обеспечивать безопасность – есть возможность определить безопасные движения для возврата в исходное положение в виртуальной среде
SoftMove – это программная опция, которая делает движение робота изменяемыми для того, чтобы он мог адаптироваться к внешним силам или изменениям, возникающим в обрабатываемых объектах














<div>It looks like your browser does not have JavaScript enabled. Please turn on JavaScript and try again.</div>
ABB Robotstudio For IRC5 v5.06 crack by LNDАрхив содержит следующие компоненты:
Мы надеемся, что данный crack для ABB Robotstudio For IRC5 v5.06 окажется для вас полезным.
It looks like your browser does not have JavaScript enabled. Please turn on JavaScript and try again.
It looks like your browser does not have JavaScript enabled. Please turn on JavaScript and try again.
Проверка на вирусы
Иногда антивирусное программное обеспечение дает ложное срабатывание на файлы типа Cracks, Patch, Keygen, Loader. Это происходит, потому что данные файлы иногда делают модификации файлов системы. В 99,9% случаев все файлы на нашем сервере являются абсолютно безопасными. Однако вы должны отдавать себе отчет о возможном риске и решить для себя, стоит ли приступать к загрузке или нет.

![]()
![]()
На страницах проекта «KeyGEN.Ru» не допускаются комментарии, нарушающие законодательство РФ, а также пропагандистские и антинаучные высказывания, реклама, оскорбления авторов публикаций, других участников дискуссии и модераторов. Также удаляются все комментарии с гиперссылками. Аккаунты пользователей, систематически нарушающих правила, будут заблокированы, а все оставленные сообщения — удалены.
HI-Speed Download Provider servers for direct downloading:Нажав кнопку "Загрузить", вы подтверждаете, что вы прочитали и согласны с лицензионным соглашением. Ваша загрузка начнется сразу после нажатия на кнопку "Скачать". Если вы не согласны с этими условиями, Вы не имеете права на использование и / или загрузку данного программного обеспечения.
«Разработка модели роботизированного участка погрузки»
Цель работы: получение студентами базовых навыков работы в среде RobotStudio 5.12 в режиме
Offline.
Содержание
1. Теоретическая часть
2. Практическая часть
2.1. Термины
2.2. Начало работы
2.2.1. Создание шаблонной системы
2.2.2. Навигация в графическом меню с использованием мыши
2.3. Управление роботом в ручном режиме
2.3.1. Управление движением манипулятора по звеньям (Joint)
2.3.2. Линейное перемещение системы координат инструмента (Tool)
2.3.3. Вращение вокруг центра системы координат инструмента
2.4. Загрузка библиотек и геометрии
2.5. Создание инструмента
2.6. Создание траекторий движения
2.6.1. Создание системы координат WorkObject
2.6.2. Создание целевых точек
2.6.3. Создание траектории
2.6.4. Редактирование траектории в Rapid Editor и моделирование движения
2.7. Управление входными/выходными цифровыми сигналами
2.8. Визуализация транспортировки
3. Задание для самостоятельной работы
1. Теоретическая часть
RobotStudio представляет собой симуляционную среду программирования роботов компании ABB.
Она позволяет реализовать off-line программирование роботов с помощью технологии VRT (Virtual
Robot Technology) без остановки производства. Эта технология использует так называемые
«виртуальные контроллеры» (VirtualController), которые представляют собой точную копию реального
программного обеспечения робота, что позволяет создавать очень реалистичный режим симуляции.
2. Практическая часть
В лабораторной работе рассмотрены следующие аспекты работы с RobotStudio:
? создание шаблонной системы;
? управление роботом в ручном режиме;
? создание траекторий;
? управление входными/выходными сигналами контроллера;
? редактирование управляющей программы в Rapid Editor;
? загрузка геометрии и библиотек;
? создание инструмента для манипулятора.
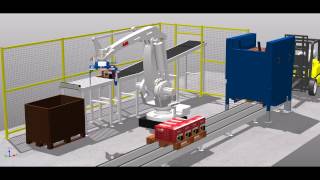
Результатом выполнения лабораторной работы является станция погрузки: манипулятор перемещает
груз с конвейера на паллету. При этом захватное устройство закрывается, когда нужно взять груз и
открывается, когда нужно его отпустить.
2.1. Термины
Станция – модель 3-х мерного пространства со всеми объектами, которые расположены в этом
пространстве.
Система RobotWare – ряд программных файлов, которые при загрузке в контроллер делает
доступными все функции, конфигурации, данные и программы, управляющие системой робота.
Виртуальный контроллер – программное средство, которое эмулирует контроллер, чтобы позволить
программе, управляющей роботом, работать на персональном компьютере.
2.2. Начало работы
Запускаем RobotStudio 5.12. Появляется сообщение, как на рис. 1.
Рис. 1. Обновление графического драйвера
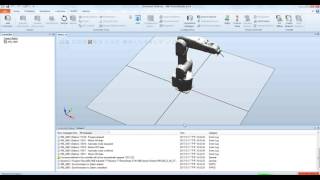
Нажимаем «No». Видим главное окно программы (рис. 2).
Рис. 2. Главное окно программы
2.2.1. Создание шаблонной системы
Нажимаем кнопку «RobotStudio» (см. рис. 2). Выбираем пункт New Station. Появляется окно, как на
рисунке 3. В левой части должен быть выбран пункт Template System, справа выбираем систему
IRB660_250kg_3.15m. Нажимаем «OK».
Рис. 3. Создание шаблонной системы
Какое-то время виртуальный контроллер грузится. К моменту окончания загрузки индикатор
состояния виртуального контроллера в правом нижнем углу окна RobotStudio становится зеленым (рис.
4), а в окне Output отображается надпись следующего вида:
IRB660_250kg_3.15m_8: Motors ON state
17.01.2011 19:19:04 Controllers
Рис. 4. Состояние контроллера
2.2.2. Навигация в графическом меню с использованием мыши
Действие
Выбор объекта
Описание
Щелкните по объекту, чтобы выбрать его. Нажмите SHIFT для
выбора нескольких объектов.
Нажать CTRL + SHIFT + левая кнопка мыши, пока двигаете
мышь для вращения вида.
Если есть колесо прокрутки, можно вместо комбинации клавиш
нажать левую кнопку мыши и колесо прокрутки.
Нажать CTRL + левая кнопка мыши, пока двигаете мышь для
перемещения вида.
Нажмите CTRL + правая кнопка мыши, пока двигаете мышь для
масштабирования вида.
Если есть колесо прокрутки, можно масштабировать вид,
вращая его или нажав колесо прокрутки и двигая мышью.
2.3. Управление роботом в ручном режиме
2.3.1. Управление движением манипулятора по звеньям (Joint)
На вкладке Home в группе команд Freehand нажимаем кнопку «Jog Joint» (рис. 5).
Рис. 5. Кнопка Jog Joint
После этого щелкаем в графическом окне по звену, которое будем перемещать. Оно выделяется
красным цветом. После этого двигая мышью, мы управляем перемещением звена (рис. 6).
Рис. 6. Перемещение звена манипулятора
2.3.2. Линейное перемещение системы координат инструмента (Tool)
На вкладке Home в группе команд Freehand нажимаем кнопку «Jog Linear» (рис. 7).
Рис. 7. Кнопка Jog Linear
В меню Layout выделяем узел манипулятора (рис. 8). В графическом окне появляются стрелки,
двигая которые мышью, мы перемещаем манипулятор (рис. 9).
Рис. 8. Узел меню Layout «Манипулятор»
Рис. 9. Линейное движение схвата/инструмента
2.3.3. Вращение вокруг центра системы координат инструмента
На вкладке Home в группе команд Freehand нажимаем кнопку «Jog Reorient» (рис. 10).
Рис. 10. Кнопка Jog Reorient
В меню Layout выделяем узел манипулятора (рис. 8). В графическом окне появляются круговые
стрелки, двигая которые мышью, мы перемещаем манипулятор (рис. 11). Однако для данного
манипулятора возможно вращение только вокруг оси z системы координат инструмента. При этом
двигается фланец манипулятора. Вращение вокруг других осей возможно для 6-степенных
манипуляторов.
Рис. 11. Вращение вокруг центра системы координат инструмента.
Теперь вернем манипулятор в исходное положение. Для этого выделяем в меню Layout узел
манипулятора, в контекстном меню нажимаем «Jump Home».
2.4. Загрузка библиотек и геометрии
Объекты, которые вы импортируете в станцию, могут быть либо геометрией, либо библиотекой.
Геометрия при импортировании копируется в станцию RobotStudio. Когда вы импортируете библиотеку,
создается связь между библиотечным файлом и станцией. К тому же, библиотечный файл может
содержать RobotStudio-специализированную информацию. Например, если инструмент сохранен как
библиотека, то tooldata сохраняется вместе с геометрической информацией.
Набор стандартных библиотек доступен сразу при установке RobotStudio. Кроме того, пользователь
может создавать свои библиотеки.
Загрузим библиотеки конвейеров (не из числа стандартных). Для этого нажимаем верхнюю часть
кнопки «Import Library» (рис. 12).
Рис. 12. Кнопка Import Library.
Появляется окошко загрузки библиотеки. В нем выбираем файл лаба_1\библиотеки\conv_box_top
(рис. 13). Нажимаем «Открыть».
Рис. 13. Загрузка конвейера
Конвейер появляется в графическом окне. Аналогично загружаем conv_pallets_top.
Загрузим стандартный библиотечный файл контроллера. Для этого нажимаем нижнюю часть кнопки
«Import Library» и выбираем IRC Control-Module (рис. 14).
Рис. 14. Загрузка контроллера
Разместим контроллер в пространстве станции. Для вращения нажимаем кнопку «Rotate» группы
команд Freehand на вкладке Home (рис. 15).
Рис. 15. Кнопка Rotate
Для линейного перемещения используем кнопку «Move» группы команд Freehand на вкладке Home
(рис. 16).
Рис. 16. Кнопка Move
Теперь загрузим несколько файлов геометрии. Нажимаем кнопку «Import Geometry» (рис. 17).
Рис. 17. Кнопка Import Geometry.
Открываем лаба_1\геометрия\Стол (это пьедестал для робота). Нужно расположить его в
пространстве. Выбираем в меню Layout узел Стол и в контекстном меню щелкаем «Set Position». В
появившемся окошке вводим следующие данные (рис. 18).
Рис. 18. Окно Set Position.
Нажимаем «Apply». Стол перемещается. Нажимаем «Close».
Теперь переместим манипулятор и его систему координат. Для этого выбираем в верхней части окна
программы вкладку Offline и нажимаем кнопку «System Configuration» (рис. 19).
Рис. 19. Кнопка System Configuration.
В появившемся окошке слева выделяем узел ROB_1, а справа вводим данные, как на рис. 20.
Рис. 20. Смещение системы координат манипулятора.
Нажимаем «ОК». Появляется окошко (рис. 21). Нажимаем «Да».
Рис. 21. Перезапуск контроллера
Во время перезапуска контроллера появляется еще одно окно (рис. 22). Нажимаем «Yes».
Рис. 22. Перемещение манипулятора
В графической части окна видим, что манипулятор переместился на пьедестал.
Создадим объект «груз». На вкладке Modeling в меню Solid выбираем объект Box.
Габаритные размеры:
Length: 210
Width: 1000
Height: 200
Выбираем узел «Груз» в меню Layout, в контекстном меню выбираем Set Position. Вводим данные,
как на рис. 23.
Рис. 23. Окно Set Position
Нажимаем Apply и Close. В графической части окна видим, что груз переместился на конвейер.
Загружаем графический файл pallet. Располагаем паллету в пространстве с помощью опции Set
Position (рис. 24).
Рис. 24. Окно Set Position
2.5. Создание инструмента
Загружаем файлы геометрии tool_part1 и tool_part2. Перемещаем tool_part2 с помощью опции Set
Position (рис. 25).
Рис. 25. Окно Set Position.
В верхней части окна программы выбираем вкладку Modeling и нажимаем кнопку «Create
Mechanism» (рис. 26).
Рис. 26. Кнопка Create Mechanism.
Появляется окошко. Вводим данные, как на рис. 27.
Рис. 27. Окно Create Mechanism.
Выделяем узел Links, в контекстном меню щелкаем Add link. Появляется окошко, как на рис. 28.
Рис. 28. Окно Create Link.
В поле Selected Part выбираем tool_part1, ставим галочку напротив Set as BaseLink. Нажимаем кнопку
со стрелкой, после этого tool_part1 появляется в поле справа. Нажимаем Apply. Появляется новое
окошко создания звена. В нем выбираем Selected Part tool_part2, нажимаем на кнопку со стрелкой. Звено
tool_part2 появляется в правом поле. Нажимаем «ОК».
Выбираем узел Joints. В контекстном меню жмем «Add Joint». В появившемся окошке вводим
данные, как на рис. 29.
Рис. 29. Окно Create Joint
Нажимаем «ОК».
Выбираем узел Tooldata, в контекстном меню щелкаем «Add tooldata». В появившемся окошке
вводим данные, как на рис. 30.
Рис. 30. Окно Create Tooldata
Нажимаем «OK».
Нажимаем кнопку «Compile Mechanism» в нижней части окна Create Mechanism (рис. 31).
Рис. 31. Окно Create Mechanism
Под окошком Poses нажимаем кнопку «Add». В появившемся окошке вводим данные, как на рис. 32.
Нажимаем «ОК».
Рис. 32. Создание позиции механизма
Добавим еще одно положение (рис. 33).
Рис. 33. Создание позиции механизма
Нажмем «ОК».
Нажимаем «Set Transmission Time» (рис. 34).
Рис. 34. Кнопка Set Transmission Time
Вводим данные в появившемся окошке, как на рис. 35.
Рис. 35. Окно Set Transmission Time
Нажимаем «ОК».
В окне Create Mechanism жмем «Close». В появившемся окошке жмем «Да» (рис. 36).
Рис. 36. Close Mechanism Modeler
Видим, что в меню Layout появился узел My_Gripper.
Прикрепляем схват к роботу. Выбираем этот узел, в контекстном меню выбираем Attach to, в
открывшемся списке жмем «IRB660_250_314…» (рис. 37).
Рис. 37. Опция Attach to
Появляется окошко (рис. 38).
Рис. 38. Сохранение прежнего положения
Жмем «Нет». В графическом окне видим, что схват переместился на фланец манипулятора.
2.6. Создание траекторий движения
2.6.1. Создание системы координат WorkObject
Сначала создадим специальные системы координат, относительно которых будут заданы целевые
точки. В RobotStudio такая система координат называется WorkObject.
Для этого на вкладке Home нажимаем кнопку «WorkObject» (рис. 39).
Рис. 39. Кнопка WorkObject
В появившемся окошке в поле Name вводим Wobj_box (рис. 40).
Рис. 40. Окно Create Workobject
Повернем станцию в графическом окне так, чтобы ее конвейер был ориентирован также как на рис.
41.
Рис. 41. Вид станции для задания Workobject
Включаем привязку к конечным точкам. Для этого нажимаем кнопку «Snap End» в верхней части
графического окна (рис. 42).
Рис. 42. Кнопка Snap End
Далее в разделе User Frame в окне Create Workobject выбираем пункт Frame by points и нажимаем на
стрелку справа от него. Появится окошко ввода координат (рис. 43).
Рис. 43. Окно ввода координат точек для Workobject
Выбираем опцию Three-point. Затем щелкаем в поле ввода координат первой точки, с помощью
привязки наводим курсор на точку 1 рис. 41 и щелкаем по ней. В полях, соответствующих первой точке,
появляются значения координат. Аналогично вводим координаты для второй и третьей точек.
Нажимаем «Assept». В окне Create WorkObject нажимаем «Create».
Аналогично создаем WorkObject с названием Wobj_pallet на основе точек, показанных на рис. 44.
Рис. 44. Вид станции для задания Workobject
2.6.2. Создание целевых точек
Теперь займемся созданием целевых точек траектории. Точки будем задавать путем введения их
координат, а также обучением.
Нажмем кнопку «Target» вкладки Home, выберем пункт Create Target… (рис. 45).
Рис. 45. Кнопка Create Target
Появляется окно ввода данных (рис. 46). Заполняем графы Position и Orientation, выбираем
WorkObject Wobj_box. Нажимаем кнопку «Add», а затем «Create».
Рис. 46-47. Окно Create Target
Создадим еще одну целевую точку с данными, как на рис. 47.
Теперь закроем окно Create Target. Откроем меню Paths&Targets (рис. 48).
Рис. 48. Меню Paths&Targets
Точку, принадлежащую Wobj_box, переименуем в take_box, а точку, принадлежащую Wobj_pallet – в
put_box.
Выберем точку put_box в меню Paths&Targets. В контекстном меню щелкнем «Jump To Target».
Появится окно, как на рис. 49. Выбираем Cfg 1 (0,0,0,0) и нажимаем «Apply». В графическом окне
видим, что манипулятор переместился в точку put_box. Повторяем все то же самое для точки take_box.
Рис. 49. Окно Select Robot Configuration
Теперь создадим пару точек со смещением вверх относительно take_box и put_box. Для этого
скопируем точку take_box, выделим узел Wobj_box_of и в контекстном меню выберем пункт Paste.
Появится новая точка с названием take_box_2. Переименуем ее в take_box_offset. Выделим точку
take_box_offset и в контекстном меню выберем пункт Modify Target -> Set Position. В появившемся
окошке введем данные, как на рис. 50.
Рис. 50. Окно Set Position
Нажимаем «Apply».
Аналогично создадим put_box_offset.
Теперь добавим промежуточную точку между позициями put_box_offset и take_box_offset с тем
расчетом, чтобы манипулятор не сталкивался с конвейером. В этой же точке манипулятор будет
останавливаться в конце траектории.
На вкладке Home в разделе Settings поменяем систему координат Workobject на wobj0 (рис. 51).
Рис. 51. Смена системы координат
Выведем манипулятор в нужную точку вручную, как описано в пункте 3. Затем нажмем кнопку
«Target» и выберем пункт Teach Target (рис. 52).
Рис. 52. Кнопка Teach Target
Переименуем точку в Home_position.
2.6.3. Создание траектории
Нажимаем кнопку «Empty Path» (рис. 53).
Рис. 53. Кнопка Empty Path
При этом в меню Paths&Targets в разделе Path появляется пустая траектория Path_10. Добавим в
траекторию Path_10 целевые точки. Для этого выделяем в меню Paths&Targets целевую точку
Home_position. В контекстном меню нажимаем Add to path -> Path_10 -> (рис. 54).
Рис. 54. Добавление точки в траекторию
Точка добавляется в траекторию.
Добавляем в траекторию другие точки в последовательности, как на рис. 55.
Рис. 55. Полученная траектория
2.6.4. Редактирование траектории в Rapid Editor и моделирование движения
Выделяем Path_10, в контекстном меню нажимаем Synchronize to VC… Появляется окошко (рис.
56). Жмем «ОК».
Рис. 56. Окно Synchronize to Virtual Controller
При этом может появиться сообщение следующего вида (глюк):
«Unknown Error: Synchronize to Virtual Controller
22.01.2011 22:12:10 General »
Если это произошло, нужно на вкладке Offline нажать кнопку «Restsart» и выбрать пункт Warmstart (рис.
57).
Рис. 57. Перезапуск контроллера
Виртуальный контроллер перезагрузится, после этого нужно повторить попытку синхронизации.
Чтобы открыть автоматически созданную программу, нужно выбрать вкладку Offline, в окне Offline
выделить узел Module1 (рис. 58) и нажать кнопку «Rapid Editor» (рис. 59).
Рис. 58. Окно Offline.
Рис. 59. Кнопка Rapid Editor
Произведем следующие изменения.
? Для первой и последней точек траектории заменим команду MoveL на MoveJ. Это означает, что
манипулятор будет перемещаться в эти точки не по прямой, а так, чтобы движение всех его
звеньев было минимальным.
? В точках take_box и put_box заменим z100 на fine. Это значит, что манипулятор должен прийти в
эти точки точно.
Нажмем кнопку «Apply Changes», которая расположена на панели над текстом программы (рис. 60).
Рис. 60. Кнопка Apply Changes
В окне Output должно появиться сообщение об отсутствии ошибок.
Закроем пока Rapid Editor. Выбираем вкладку Simulation, нажимаем кнопку «Simulation Setup» (рис.
61).
Рис. 61. Кнопка Simulation Setup.
Появляется окно (рис. 62). В списке Available Procedures выделяем траекторию Path_10 и нажимаем на
стрелку. После этого жмем «ОК».
Рис. 62. Окно Setup Simulation
Теперь программа, управляющая движением манипулятора вдоль заданной траектории, создана.
Промоделируем движение. Для этого в графическом окне нажмем кнопку «Play» (рис. 63).
Рис. 63. Кнопка Play
В графическом окне видим, как манипулятор перемещается вдоль траектории.
2.7. Управление входными/выходными цифровыми сигналами
С помощью цифровых сигналов в данной лабораторной работе мы будем управлять состоянием
захватного устройства.
Создадим 2 сигнала. Когда импульс будет приходить на один из сигналов, схват будет открываться,
когда на другой – закрываться.
Откроем вкладку Offline, в меню Offline выделим узел контроллера (рис. 64).
Рис. 64. Узел контроллера
Нажмем кнопку «Configuration Editor» (рис. 65).
Рис. 65. Кнопка Configuration Editor
Выберем пункт I/O. Появляется окошко (рис. 66), в нем в колонке Type name выбираем Signal. Затем
щелкаем правой кнопкой мыши в правой части окна, в контекстном меню выбираем Add Signal.
Появляется окно Edit Signal (рис. 67).
Рис. 67. Окно Edit Signal
Заполняем таблицу следующим образом:
Name
Type of Signal
Access Level
Нажимаем «ОК». Аналогично создаем сигнал doCloseGripper.
Перезапускаем контроллер (Restart -> Warmstart).
Связываем сигнал с событием (открытие или закрытие схвата). Открываем вкладку Simulation,
нажимаем кнопку «Event Manager» (рис. 68).
Рис. 68. Кнопка Event Manager
В появившемся окошке нажимаем кнопку «Add». Появляется окно Choose Trig Type and Activation
(рис. 69). Ничего в нем не меняем, нажимаем «Next».
Рис. 69. Окно Choose Trig Type and Activation
В левой части окна I/O Signal Trigger (рис. 70) выбираем сигнал doOpenGripper, проверяем, что в
правой части окна точка стоит напротив пункта Signal is true (‘1’). Нажимаем “Next».
Рис. 70. Окно I/O Signal Trigger
В окне Choose Action Type (рис. 71) выбираем пункт Move Mechanism to Pose. Нажимаем «Next».
Рис. 71. Окно Choose Action Type
В окне Move Mechanism to Pose (рис.72) выбираем:
Mechanism
Pose
Рис. 72. Окно Mechanism to Pose
Нажимаем «Finish».
Повторяем то же для сигнала doCloseGripper с единственным отличием: в последнем окне выбираем
не Home Pose, а Pose Closed.
Выбираем вкладку Simulation, нажимаем кнопку «I/O Simulator» (рис. 73).
Рис. 73. Кнопка I/O Simulator
Появляется окно, как на рис. 74.
Рис. 74. Симулятор сигналов
Проверим работу сигналов: при изменении doCloseGripper с «0» на «1» захватное устройство
закрывается, при изменении сигнала doOpenGripper с «0» на «1» захватное устройство открывается.
2.8. Визуализация транспортировки
Теперь необходимо создать визуализацию захвата груза схватом для их совместного перемещения по
траектории. Для этого задаем два управляющих сигнала:
Attach (для прикрепления груза от схвата) и Detach (для отделения груза от схвата).
Сигналы создадим в меню Configuration Editor аналогично тому, как были созданы сигналы
doCloseGripper и doOpenGripper (рис.66-67).
Заполняем таблицу следующим образом:
Name
Type of Signal
Access Level
Name
Type of Signal
Access Level
Необходимо создать объект, который будет находиться на схвате и контактировать с грузом
(физическая интерпретация: полоска из резины для увеличения коэффициента трения между схватом и
грузом).
На вкладке Modeling в меню Surface выбираем объект Surface Rectangle.
Габаритные размеры и ориентацию объекта вводим как показано на рис. 75.
Рис. 75. Окно установки размеров объекта
Назовем созданный объект «Attacher» и переместим его на захватное устройство.
Установим робот в исходное положение, нажав «Jump Home» (раздел 3).
Свяжем положение объекта Attacher и захвата.
Выбираем узел Attacher в меню Layout, в контекстном меню выбираем AttachTo – IRB_660_250_315.
Установим положение объекта Attacher. Выбираем узел Attacher в меню Layout, в контекстном меню
выбираем Set Position. Вводим данные, как на рис. 76.
Рис. 76. Окно установки положения объекта
Объект перемещается на внутреннюю поверхность неподвижной части схвата.
Связываем сигнал с событием. Открываем вкладку Simulation, нажимаем кнопку «Event Manager»
(рис.68)
В появившемся окошке нажимаем кнопку «Add». Появляется окно Choose Trig Type and Activation
(рис.69). Ничего в нем не меняем, нажимаем «Next».
В левой части окна I/O Signal Trigger выбираем сигнал Attach, проверяем, что в правой части окна
точка стоит напротив пункта Signal is true (‘1’). Нажимаем «Next».
В окне Choose Action Type (риc. 77) выбираем пункт Attach Object. Нажимаем «Next».
Рис.77. Окно выбора объекта
Выбираем объект, который надо прикрепить и объект, к которому происходит прикрепление (рис.
78).
Рис.78. Прикрепление объекта
Эти действия повторяем и для сигнала Detach.
В левой части окна I/O Signal Trigger выбираем сигнал Detach, проверяем, что в правой части окна
точка стоит напротив пункта Signal is true (‘1’). Нажимаем «Next».
В окне Choose Action Type (риc. 77) выбираем пункт Detach Object. Нажимаем «Next».
Выбираем объект, который надо отделить и объект, от которого происходит отделение (рис. 79).
Рис. 79. Отделение объекта
Выбираем вкладку Simulation, нажимаем кнопку «I/O Simulator» (рис. 73). Кроме сигналов
doCloseGripper и doOpenGripper на ней появляются сигналы Attach и Detach. При нажатии на кнопку
«Attach» груз прикрепляется к захватному устройству. Поэтому при перемещении манипулятора
функцией Jog Joint (глава 3) груз перемещается вместе с ним.
При нажатии на кнопку «Detach» груз открепляется от захватного устройства. Поэтому при
перемещении манипулятора функцией Jog Joint груз остается в своем прежнем положении
Откроем текст управляющей программы в Rapid Editor.
Добавим в программу строчки, выделенные красным в нижеприведенном тексте программы.
Текст программы:
PROC Path_10()
MoveJ Home_position,v1000,z100,My_Gripper_1\WObj:=wobj0;
MoveL take_box_offset,v1000,z100,My_Gripper_1\WObj:=Wobj_box;
MoveL take_box,v1000,fine,My_Gripper_1\WObj:=Wobj_box;
PulseDO doCloseGripper;
PulseDo Attach;
WaitTime 0.5;
MoveL take_box_offset,v1000,z100,My_Gripper_1\WObj:=Wobj_box;
MoveL Home_position,v1000,z100,My_Gripper_1\WObj:=wobj0;
MoveL put_box_offset,v1000,z100,My_Gripper_1\WObj:=Wobj_pallet;
MoveL put_box,v1000,fine,My_Gripper_1\WObj:=Wobj_pallet;
PulseDO doOpenGripper;
PulseDo Detach;
WaitTime 0.5;
MoveL put_box_offset,v1000,z100,My_Gripper_1\WObj:=Wobj_pallet;
MoveJ Home_position,v1000,z100,My_Gripper_1\WObj:=wobj0;
ENDPROC
PROC main()
SetDO doOpenGripper, 0;
SetDO doCloseGripper, 0;
SetDo Attach, 0;
SetDO Detach, 0;
PulseDO doOpenGripper;
Path_10;
ENDPROC
Добавленные команды имеют следующее назначение:
SetDO
PulseDO
WaitTime
Устанавливаем значение сигнала
Подаем импульс
Задержка
Нажимаем «Apply Changes» и закрываем редактор.
Моделируем движение манипулятора. Теперь захватное устройство закрывается, когда нужно взять
короб и открывается, когда нужно отпустить его.
Сохраняем станцию.
2.8. Задание для самостоятельной работы
Задание состоит в том, что меняют расположение груза, либо паллеты в пространстве и изменяют
программу в соответствии с новым их расположением.
Загрузите в станцию библиотечные файлы для вашего варианта в папке библиотеки. Задайте
траекторию движения манипулятора для снятия короба с конвейера и установки его на паллету с учетом
нового расположения объектов в пространстве.
После создания новой траектории нажмите кнопку «Record Simulation» на вкладке Simulation (рис.
75) и промоделируйте процесс. Запись сохранится в папке Мои видеозаписи.
Рис. 75. Кнопка Record Simulation
Видеозапись будет отчетом по лабораторной работе.